8 Optimization of
continuum structures
In the previous chapter, we learned how to transform a continuous
elastic problem defined on a two-dimensional domain into a discrete
problem using finite elements. Now we want to optimize such
problems.
Learning Objectives
After studying this chapter and finishing the exercise, you should be
able to
transfer solution methods from intrinsically discrete truss
structures to FEM-discretized problems
explain the solution process for variable thickness sheets (size
optimization)
solve for binary topologies using the SIMP approach
discuss numerical problems in topology optimization
apply filters to deal with numerical problems and manufacturing
constraints in topology optimization
explain the need for mesh morphing in shape optimization
8.1 Size optimization
Let’s consider a two-dimensional domain discretized with finite
elements, in which we can adjust the thickness of each element. We may
seek the best distribution of thicknesses \(\mathbf{d}\) to minimize compliance \(C\) with a constrained amount of material
volume \(V_0\). This problem can be
formulated in analogy to the standard problem of sizing optimization
stated in Equation
\[\begin{aligned}
\min_{\mathbf{d}} \quad & C(\mathbf{d}) = \mathbf{f} \cdot
\mathbf{u}(\mathbf{d})\\
\textrm{s.t.} \quad & \mathbf{d} \cdot \mathbf{A} - V_0 \le
0 \\
& \mathbf{d} \in \mathcal{D}\\
\end{aligned}
\label{eq:sheet_optimization}{\qquad(8.1)}\] where \(\mathbf{A}\) denotes the area of an
element. Mathematically, this problem is equivalent to the truss problem
and can be solved in the same way: We formulate the Lagrangian \[\mathcal{L}(\mathbf{d}, \mu) = C(\mathbf{d}) +
\mu \left( \mathbf{d} \cdot \mathbf{A} - V_0 \right)
\label{eq:lagrangian_sheet_optimization}{\qquad(8.2)}\] and
determine its derivative \[\frac{\partial
\mathcal{L} (\mathbf{d}, \mu)}{\partial d_j}
= \frac{\partial C(\mathbf{d})}{\partial d_j} + \mu
A_j{\qquad(8.3)}\] with \[\frac{\partial C}{\partial d_j} = -
\mathbf{u}_j(\mathbf{d}) \cdot \mathbf{k}^0_j \cdot
\mathbf{u}_j(\mathbf{d}) = -2w_j(\mathbf{d}).
\label{eq:sensitivity_sheet}{\qquad(8.4)}\] In comparison to
Equation for trusses with four degrees of freedom, the element
displacement vector contains eight degrees of freedom for these 2D
problems with linear quad elements (\(\mathbf{u}_j \in \mathcal{R}^8, \mathbf{k}^0_j \in
\mathcal{R}^{8\times 8}\)).
Just like the truss problem, the variable thickness sheet problem can
be approximated using MMA with lower asymptotes only. Subsequently, it
is solved with the dual method and a line search to find the Lagrange
parameter \(\mu\). The entire procedure
is identical to Section , if we replace the truss cross sections \(\mathbf{a}\) with element thicknesses \(\mathbf{d}\) and the truss lengths \(\mathbf{l}\) with element areas \(\mathbf{A}\).
Example: Size optimization with
MMA
Consider a FEM cantilever beam from the previous example. Instead of
just computing the displacements, we are now interested in finding the
optimal thickness of each element given a volume constraint.
We formulate the following algorithm to solve that problem:
Define the cantilever FEM model with all nodes \(\mathcal{N}\), elements \(\mathcal{E}\), material property \(E\), volume constraint \(V_0\), design limits \(\mathbf{d}^-, \mathbf{d}^+\) and the
initial design choice \(\mathbf{d}^0\).
Compute the displacements \(\mathbf{u}^k = \mathbf{u}(\mathbf{d}^k)\)
by solving the FEM system for the current design \(\mathbf{d}^k\).
Compute the strain energies densities for all elements using the
previously computed displacements \[w^k_j(\mathbf{d}^k) =
\frac{1}{2}\mathbf{u}^k_j \cdot \mathbf{k}^0_j \cdot
\mathbf{u}^k_j{\qquad(8.5)}\]
Compute the lower asymptotes as \(\mathbf{L}^k =\mathbf{d}^k - s (\mathbf{d}^+ -
\mathbf{d}^-)\) with \(s \in
(0,1)\) during the first two iterations and according to \[L^k_j =
\begin{cases}
d^k_j - s (d^{k-1}_j-L^{k-1}_j) &
(d_j^k-d_j^{k-1})(d_j^{k-1}-d_j^{k-2}) < 0\\
d^k_j - \frac{1}{\sqrt{s}} (d^{k-1}_j-L^{k-1}_j) &
\text{else}
\end{cases}{\qquad(8.6)}\] in the following
iterations.
Compute the lower move limit as \[\tilde{\mathbf{d}}^{-,k} =
\max(\mathbf{d}^-, 0.9 \mathbf{L}^k + 0.1
\mathbf{d}^k){\qquad(8.7)}\]
Evaluate the analytical solution \[\begin{aligned}
\hat{d}_j(\mu) &= L_j^k + \sqrt{\frac{2 w_j
(\mathbf{d}^k)
(L^k_j-d^k_j)^2}{\mu A_j}} {\qquad(8.8)}\\
\mathbf{d}^* (\mu) &=
\textrm{clamp}\left(\hat{\mathbf{d}}(\mu), \tilde{\mathbf{d}}^{-,k},
\mathbf{d}^+ \right)
{\qquad(8.9)}\end{aligned}\]
Perform a line search to find the root \(\mu^*>0\) in \[\frac{\partial \underline{\mathcal{L}}}{\partial
\mu}(\mu) = \mathbf{A} \cdot \mathbf{d}^* (\mu) - V_0 =
0{\qquad(8.10)}\] with Newton’s method or bisection
method.
Repeat with steps 2-7 until convergence or a maximum number of
iterations is reached.
The following image shows a result of the algorithm for the
cantilever problem stated above. Black areas use the full maximum
thickness \(\mathbf{d}^+\) and white
areas use the minimum thickness \(\mathbf{d}^-\). The intermediate values are
represented by different shades of gray.
8.2 Topology optimization with
MMA
In a topology optimization of continuum structures, we want to
optimize the neighborhood relations of a structure. While the size or
shape of an object could be changed by some deformation, we cannot
change a topology to another by a "rubber-like" deformation. Essentially
this means, in topology optimization we are seeking the fundamental
structure of a component: Which parts are connected? How many holes are
in it?
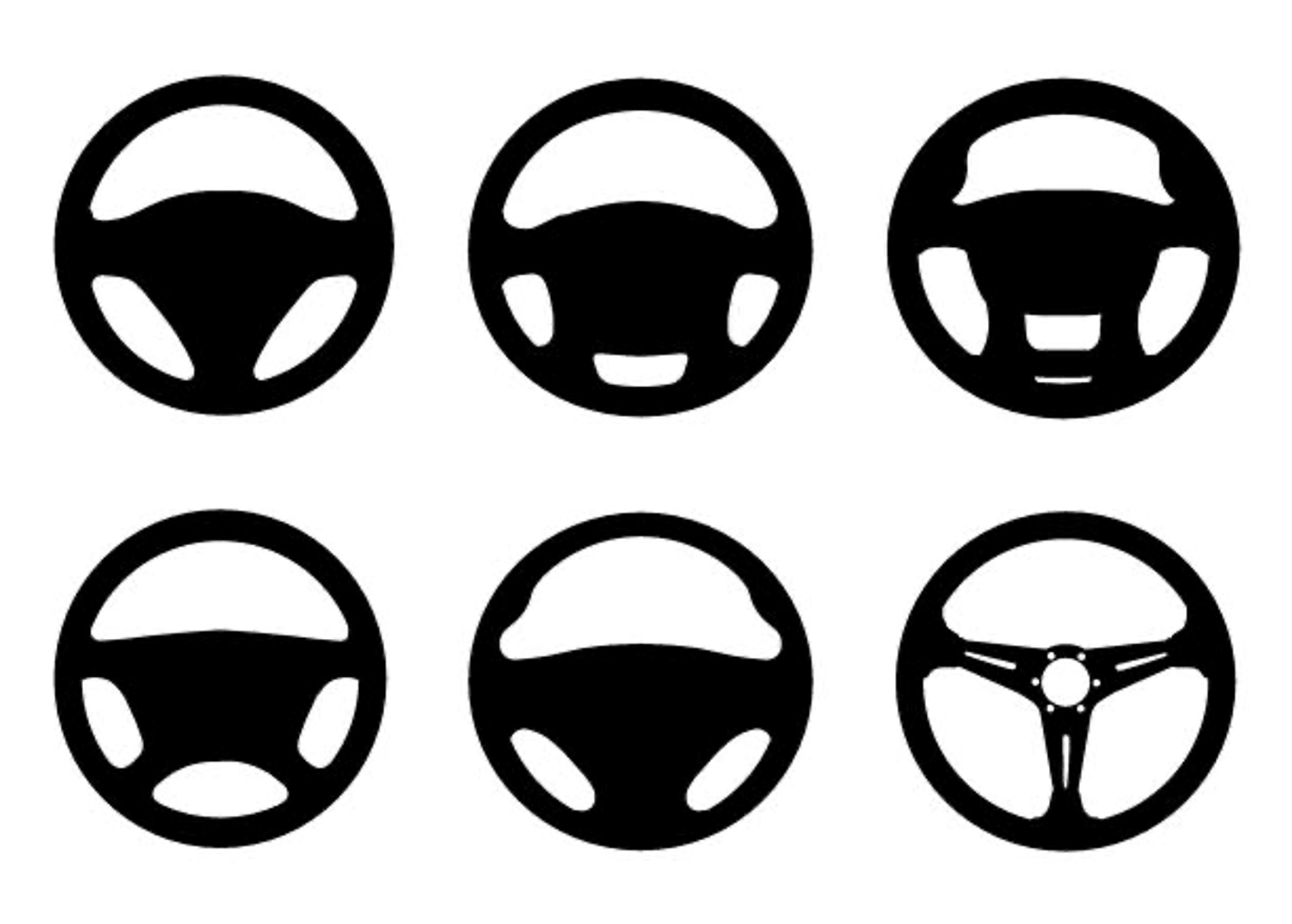
Example: Topology of steering
wheels
Out of the following schematic steering wheels, the top left wheel may
be transformed to the bottom center wheel by an appropriate deformation.
They have the same topology, but different shapes. However, they cannot
be transformed to any other steering wheel, as this would require
formation of new holes and break the neighborhood relations.
There are two main approaches to optimize the topology (Eschenauer and Olhoff
2001): In a geometry-based formulation, we describe the
domain in a dynamic fashion ( e.g. by a Level-Set method) and modify
this geometry towards the optimum (e.g. by empirical growth rules like
SKO or CAIO). In a material-based formulation, we describe the
entire domain with finite elements and then seek a material distribution
where each element is either completely filled or completely unfilled
with material. In this lecture, we focus entirely on the latter
approach.
We can formulate such a problem by reinterpreting the thickness
variable as a normalized material density \(\pmb{\rho}\), where \(\rho_j=1\) indicates presence of material
and \(\rho_j=0\) indicates absence of
material in element \(j\). The
stiffness of each element becomes a function of \(\rho_j\), e.g. \[\mathbb{C}(\rho_j)=
\begin{cases}
\mathbb{C} & \text{if} \quad \rho_j = 1 \\
0 & \text{if} \quad \rho_j = 0
\end{cases}{\qquad(8.11)}\]
Then, the problem statement reads \[\begin{aligned}
\min_{\pmb{\rho}} \quad & C(\pmb{\rho}) = \mathbf{f} \cdot
\mathbf{u}(\pmb{\rho})\\
\textrm{s.t.} \quad & \pmb{\rho} \cdot \mathbf{V} - V_0 \le
0 \\
& \rho_j \in \{0, 1\}\\
\end{aligned}
\label{eq:topology_optimization}{\qquad(8.12)}\]
where the only change compared to Equation 8.1 is the discrete nature of the
design variables \(\pmb{\rho}\) and the
name of the design variables.
As mentioned during truss optimization, the binary problem is
notoriously hard to solve. Hence we use Solid Isotropic Material
with Penalization (SIMP) again, which is denoted as \[\mathbb{C}(\rho_j)= \rho_j^p
\mathbb{C}{\qquad(8.13)}\] for the generalized FEM problem.
Incorporating the SIMP method to the optimization is
straight-forward: The element stiffness for a 2D problem with element
thicknesses \(d_j\) is now \[\mathbf{k}_j(\rho_j) = \rho_j^p d_j
\mathbf{k}^0_j{\qquad(8.14)}\] and consequently, the gradient
becomes \[\frac{\partial\mathbf{k}_j(\rho_j)}{\partial
\rho_j} = p \rho_j^{p-1} d_j\mathbf{k}^0_j.{\qquad(8.15)}\]
Then, we just need to adjust the sensitivity (see Equation 8.4) slightly towards \[\frac{\partial C}{\partial \rho_j} (\pmb{\rho}) =
- p \rho_j^{p-1} d_j\mathbf{u}_j(\pmb{\rho}) \cdot \mathbf{k}^0_j \cdot
\mathbf{u}_j(\pmb{\rho}) = -2 p \rho_j^{p-1} d_j w_j(\pmb{\rho}).
\label{eq:sensitivity_topology}{\qquad(8.16)}\]
Example: Topology optimization with MMA and
SIMP
Consider the FEM cantilever beam from the previous example. We slightly
change the algorithm towards the following:
Define the cantilever FEM model with all nodes \(\mathcal{N}\), elements \(\mathcal{E}\), material property \(E\), volume constraint \(V_0\), a lower design limit \(\pmb{\rho}^-\) and the initial design
choice \(\pmb{\rho}^0\).
Compute the displacements \(\mathbf{u}^k = \mathbf{u}(\pmb{\rho}^k)\)
by solving the FEM system for the current design \(\pmb{\rho}^k\).
Compute the strain energies densities for all elements using the
previously computed displacements \[w^k_j(\pmb{\rho}^k) = \frac{1}{2}\mathbf{u}^k_j
\cdot \mathbf{k}^0_j \cdot
\mathbf{u}^k_j{\qquad(8.17)}\]
Compute the lower asymptotes as \(\mathbf{L}^k =\pmb{\rho}^k - s (\mathbf{1} -
\pmb{\rho}^-)\) with \(s \in
(0,1)\) during the first two iterations and according to \[L^k_j =
\begin{cases}
\rho^k_j - s (\rho^{k-1}_j-L^{k-1}_j) &
(\rho_j^k-\rho_j^{k-1})(\rho_j^{k-1}-\rho_j^{k-2}) < 0\\
\rho^k_j - \frac{1}{\sqrt{s}} (\rho^{k-1}_j-L^{k-1}_j)
& \text{else}
\end{cases}{\qquad(8.18)}\] in the following
iterations.
Compute the lower move limit as \[\tilde{\pmb{\rho}}^{-,k} =
\max(\pmb{\rho}^-, 0.9 \mathbf{L}^k + 0.1
\pmb{\rho}^k){\qquad(8.19)}\]
Evaluate the analytical solution \[\begin{aligned}
\hat{\rho}_j(\mu) &= L_j^k + \sqrt{\frac{2 p
\rho_j^{p-1} d_j w_j (\pmb{\rho}^k)
(L^k_j-\rho^k_j)^2}{\mu V_j}} {\qquad(8.20)}\\
\pmb{\rho}^* (\mu) &=
\textrm{clamp}\left(\hat{\pmb{\rho}}(\mu), \tilde{\pmb{\rho}}^{-,k},
\mathbf{1}\right)
{\qquad(8.21)}\end{aligned}\]
Perform a line search to find the root \(\mu^*>0\) in \[\frac{\partial \underline{\mathcal{L}}}{\partial
\mu}(\mu) = \mathbf{V} \cdot \pmb{\rho}^* (\mu) - V_0 =
0{\qquad(8.22)}\] with Newton’s method or bisection
method.
Repeat with steps 2-7 until convergence or a maximum number of
iterations is reached.
This procedure results in the following solution:
Obviously, the SIMP approach helps us to find a binary solution of
the discretized problem stated in Equation 8.12. However, we may ask ourselves
if there is a unique solution to this problem independent of
discretization. And it turns out, the answer is no: You can improve any
given design by replacing it with finer structures in a process that
goes on indefinitely (Christensen and Klarbring 2008). In
addition to the theoretical non-existence of a solution, this also means
that our solution is mesh-dependent: If we want to refine the
solution, we may end up with a totally different solution.
Even if we were to accept mesh dependence and the theoretical problem
of ill-posedness, we are still left with challenges in the resulting
designs. First of all, fine structures may be hard to manufacture. Even
additive manufacturing methods are limited to some minimal structure
size. Secondly, we may observe checkerboard-like patterns on the
structure. These are numerical artifacts from the fact that we use
linear shape functions which lead to an overestimation of the stiffness
for that configuration.
Example: Mesh dependency
We can increase the resolution of the previous examples to achieve
better compliance results. However, this demonstrates the
mesh-dependence of the solution as we observe different structures in
both cases. Additionally, the resulting fine structures might be
difficult to manufacture.
We can address all these problems with the introduction of filters as
a regularization (Harzheim 2014; Lazarov and
Sigmund 2011). There are two traditional approaches for
mesh-independent filtering: density filtering and
sensitivity filtering. In density filtering, we replace the
density \(\pmb{\rho}\) with a weighted
sum of neighboring densities, and use this filtered density \(\tilde{\pmb{\rho}}\) in the stiffness
evaluation \[\mathbb{C}(\rho_j)=
\tilde{\rho}_j^p \mathbb{C}.{\qquad(8.23)}\] The filtered density
is computed according to \[\tilde{\rho}_j
(\pmb{\rho}) = \frac{\sum_i H_{ji} A_i \rho_i}{\sum_i H_{ji}
A_i}{\qquad(8.24)}\] with a distance weighting matrix \[H_{ji} =
\begin{cases}
R-\textrm{dist}(i,j) & \text{if} \quad \textrm{dist}(i,j)
\le R \\
0 & \text{else},
\end{cases}{\qquad(8.25)}\] where \(R\) describes the filter radius and \(\textrm{dist}(i,j)\) the distance between
element centers of elements \(i\) and
\(j\). This filter results in a
structural weakening of structures finer than \(R\), as they get smeared with neighboring
empty elements. Hence, the filter solves the mesh-dependency problem,
prevents structures that cannot be manufactured and prevents
checkerboard patterns. However, we need to account for the filter during
sensitivity computation by \[\frac{\partial
C}{\partial \rho_j}
= \frac{\partial C}{\partial \tilde{\rho}_m} \frac{\partial
\tilde{\rho}_m}{\partial \rho_j}
= \frac{\partial C}{\partial \tilde{\rho}_m} \frac{H_{jm} A_m
}{\sum_i H_{ji} A_i}{\qquad(8.26)}\] and in the volume
constraint.
An alternative to filtering densities is filtering of sensitivities.
We may compute the filtered sensitivity as \[\widetilde{\frac{\partial C}{\partial \rho_j}} =
\frac{A_j}{\rho_j} \frac{\sum_i H_{ji} \frac{\rho_i}{A_i} \frac{\partial
C}{\partial \rho_i}}{\sum_i H_{ji}}{\qquad(8.27)}\] which is a
purely heuristic concept, i.e. there is no mathematical proof for this
filter to work (Sigmund and Petersson 1998;
Sigmund 2007). However, we can implement this formulation simply
by replacing the sensitivities in 8.16 with filtered sensitivities.
This is very efficient, simple to implement and experience shows that
this filter works quite well.
Example: Sensitivity filtering
The following images show the optimized cantilever beams from previous
examples with enabled sensitivity filtering employing the same filtering
radius for each resolution. Filtering prevents small structures and
regularizes the problem such that we achieve the same optimal designs
for different mesh sizes.
There is one more challenge in the SIMP formulation of the standard
topology optimization problem: For \(p>1\), the problem is not convex anymore
and different starting points may result in different local minima (Christensen and Klarbring
2008). A strategy to cure termination at non-global minima is a
gradual increase of \(p\) starting from
\(p=1\) or using multiple starting
points.
8.3 Topology
optimization with optimality criteria
The solution via MMA is in line with the previous chapters of this
manuscript and is able to solve arbitrary problems beyond the compliance
minimization stated in problem 8.12. Historically, this specific
problem was first solved with the optimality criteria method
instead of convex approximations. The idea here is that we can use the
gradient of the Lagrangian \[\mathcal{L}(\pmb{\rho}, \mu) = C(\pmb{\rho}) +
\mu \left( \pmb{\rho} \cdot \mathbf{V} - V_0
\right),{\qquad(8.28)}\] which is \[\frac{\partial \mathcal{L} (\pmb{\rho},
\mu)}{\partial\rho_j}
= \frac{\partial C(\pmb{\rho})}{\partial \rho_j} + \mu V_j =
0,{\qquad(8.29)}\] at the optimal point, to formulate an
optimality condition \[G_j =
\frac{-\frac{\partial C(\pmb{\rho})}{\partial \rho_j}}{\mu V_j} =
\frac{p \rho_j^{p-1} d_j \mathbf{u}_j(\pmb{\rho}) \cdot \mathbf{k}^0_j
\cdot \mathbf{u}_j(\pmb{\rho})}{\mu V_j} = 1{\qquad(8.30)}\] that
must be fulfilled at the optimum whenever a variable does not reach its
bounds. A heuristic algorithm can now compute \(G_j\) and adjust \(\rho_j\) such that \(G_j\) approaches 1. We may realize that
increasing \(\rho_j\) increases the
stiffness and hence decreases the displacement for a given load.
Consequently, increasing \(\rho_j\)
decreases \(G_j\) and vice versa.
Hence, an update rule \[\hat{\rho}_j^{k+1} =
\left(G_j^k\right)^\xi \rho_j^k{\qquad(8.31)}\] drives the
solution towards the optimal point \(\rho_j^*\), where \(G^*_j=1\). The exponent \(\xi \in (0,1]\) stabilizes the algorithm
with typical values being \(\xi=0.5\)
(Harzheim
2014).
In addition, we employ move limits \[\begin{aligned}
\rho_j^{-,k} &= \max \left(\rho_j^-, (1-m)\rho_j^k \right)
{\qquad(8.32)}\\
\rho_j^{+,k} &= \min \left(\rho_j^+, (1+m)\rho_j^k \right)
{\qquad(8.33)}\end{aligned}\] to compute the next value as \[\rho_j^{k+1} = \textrm{clamp}
\left(\hat{\rho}_j^{k+1}, \rho_j^{-,k}, \rho_j^{+,k}
\right).{\qquad(8.34)}\] The move limits reduce the maximum step
width and account for bounds on the design variables.
To compute \(G_j\), we need to
determine the value of the Lagrange multiplier \(\mu\). For the compliance problem, we can
intuitively assume that the stiffest structure will use all material and
consequently, that the volume constraint will be active. The Lagrange
multiplier may be found with the bisection method on the feasibility
condition \[\frac{\partial
\mathcal{L}}{\partial \mu} = \pmb{\rho}(\mu) \cdot \mathbf{V} - V_0 =
0.{\qquad(8.35)}\]
Example: Algorithm with optimality
criteria
Consider a FEM cantilever beam from the previous example.
We formulate the following algorithm to solve that problem:
Define the cantilever FEM model with all nodes \(\mathcal{N}\), elements \(\mathcal{E}\), material property \(E\), volume constraint \(V_0\), lower design limit \(\pmb{\rho}^-\) and the initial design
choice \(\pmb{\rho}^0\).
Compute the displacements \(\mathbf{u}^k = \mathbf{u}(\pmb{\rho}^k)\)
by solving the FEM system for the current design \(\pmb{\rho}^k\).
Compute the sensitivity \[\frac{\partial C}{\partial \rho_j} = -2 p
\rho_j^{p-1} d_j w_j(\pmb{\rho}){\qquad(8.36)}\] and filter it
according to \[\widetilde{\frac{\partial
C}{\partial \rho_j}} = \frac{A_j}{\rho_j} \frac{\sum_i H_{ji}
\frac{\rho_i}{A_i} \frac{\partial C}{\partial \rho_i}}{\sum_i
H_{ji}}{\qquad(8.37)}\]
Apply the bisection method to find the root of \[g(\mu) = \pmb{\rho}^{k+1}(\mu) \cdot \mathbf{V} -
V_0{\qquad(8.38)}\] with \[\rho^{k+1}_j(\mu) = \textrm{clamp}
\left(\hat{\rho}_j^{k+1}, \rho_j^{-,k}, \rho_j^{+,k}
\right){\qquad(8.39)}\] with \[\hat{\rho}_j^{k+1} = \left(\frac{ -
\widetilde{\frac{\partial C}{\partial \rho_j}}}{\mu V_j}\right)^\xi
\rho_j^k.{\qquad(8.40)}\]
Repeat with steps 2-4 until convergence or a maximum number of
iterations is reached.
8.4 Shape optimization
Shape optimization of continua seeks the optimal shape of the outer
perimeter of a structure without adjusting the topology, i.e. without
adding new perimeters like holes. The shape optimization problem for
minimum compliance for a given volume constraint can be formulated
analogously to trusses (see Equation ) as
\[\begin{aligned}
\min_{\mathbf{x}} \quad & C(\mathbf{x}) = \mathbf{f} \cdot
\mathbf{u}(\mathbf{x})\\
\textrm{s.t.} \quad & g(\mathbf{x}) = \mathbf{d} \cdot
\mathbf{A}(\mathbf{x}) - V_0 \le 0 \\
& \mathbf{x} \in \mathcal{X}
\end{aligned}
\label{eq:shape_optimization_continuum}{\qquad(8.41)}\]
A natural choice for design variables are the coordinates of nodes
bounding the meshed domain, just as it has been done for trusses.
However, this leads to jagged meshes with inaccurate stress calculations
and limited deformation capabilities, as illustrated in the following
example.
Example: Direct shape optimization of a cantilever
beam
Consider the cantilever beam from previous examples. If we choose nodal
coordinates of the lower edge as design variables (highlighted with
black dots) and try to minimize the compliance with a volume constraint,
the stiffness improves slightly. However, the mesh is very irregular and
leads to inaccurate stress calculations. Furthermore, the deformation is
limited as it should neither result in collapsed elements nor highly
stretched elements.
We may prevent the disadvantages of the direct nodal optimization by
describing the deformation of the domain by a linear combination of
basic shape modifications. This could be achieved by describing the
perimeter with a spline representation (Christensen and Klarbring 2008) or
by morphing operations on the mesh. Here, we decide to morph the mesh
using radial basis functions (Biancolini et al. 2020). A radial
basis function (RBF) \(\varphi \in
\mathcal{R}\) is a function, that depends on the Euclidean
distance \(r = \lVert
\mathbf{x}-\hat{\mathbf{x}} \rVert\) to some fixed point \(\hat{\mathbf{x}}\). We can use radial basis
functions to interpolate the deformation of the mesh for a set of given
control points \(\hat{\mathbf{x}}_i\)
as \[\delta(\mathbf{x}) = \sum_{l=1}^P
\gamma_i \varphi(\lVert \mathbf{x}-\hat{\mathbf{x}}_i
\rVert).{\qquad(8.42)}\]
Example: Radial basis functions
Examples for radial basis functions are
Table 8.1
| Gaussian: |
\(\varphi(r) =
e^{-(\epsilon r)^2}\) |
| Linear: |
\(\varphi(r) =
r\) |
The interpolation should coincide with prescribed deformations at the
control points \(\delta_i\), i.e. \[\delta(\mathbf{x}_i) = \delta_i \quad \forall i
\in [1, P]{\qquad(8.43)}\] must hold. To find weights fulfilling
this condition, we can solve the linear system of equations \[\mathbf{M} \cdot \pmb{\gamma} =
\pmb{\delta}{\qquad(8.44)}\] with the interpolation matrix \[M_{ij} = \varphi(\lVert
\mathbf{x}_i-\hat{\mathbf{x}}_j \rVert) \quad i,j \in [1,
P].{\qquad(8.45)}\] Using the control points as design variables,
we can modify the shape smoothly with a linear combination of basic
shape modifications. The type of RBF constraints the solution space of
shapes that can be achieved by shape optimization.
Example: Shape modification with
RBFs
Consider the cantilever beam from previous examples. We can define a set
of shape modifications with control points and Gaussian RBFs. Each shape
modification is defined by its own design variable.




We may also use linear RBFs to define shape modifications:




We may reformulate the optimization problem now in terms of the
design variables \(\delta_i\) as \[\begin{aligned}
\min_{\pmb{\delta}} \quad & C(\pmb{\delta}) = \mathbf{f}
\cdot \mathbf{u}(\pmb{\delta})\\
\textrm{s.t.} \quad & g(\pmb{\delta}) = \mathbf{d} \cdot
\mathbf{A}(\pmb{\delta}) - V_0 \le 0 \\
& \pmb{\delta} \in \mathcal{D}
\end{aligned}
\label{eq:shape_optimization_morph}{\qquad(8.46)}\]
Just like in shape optimization of trusses, target function and
constraint function are generally non-linear and non-separable. Hence,
we use MMA to approximate the problem and solve it equivalent to
Equations to . We do not elaborate the analytical derivation of the
gradients (this can be found e.g. in Chapter 6.3.2.2 in (Christensen and Klarbring
2008)), but simply rely on automatic differentiation to compute
\(\frac{\partial C}{\partial
\delta_i}\) and \(\frac{\partial
g}{\partial \delta_i}\).
Example: Shape optimization of a cantilever
beam
Consider the truss with Gaussian shape modifications from the previous
example. We select the vertical degree of freedom of the five control
points at the lower edge as design variables \(\pmb{\delta} \in \mathcal{R}^5\).
We want to solve for the optimal shape \(\pmb{\delta}^*\) that minimizes the
compliance of the structure without exceeding the initial volume of the
truss. Hence, we formulate the following algorithm to solve the
approximated problem:
Define the cantilever FEM model with all nodes \(\mathcal{N}\), elements \(\mathcal{E}\), material properties \((E, \nu)\) , volume constraint \(V_0\), design limits \(\pmb{\delta}^-, \pmb{\delta}^+\) and the
initial design choice \(\pmb{\delta}^0\).
Compute the mesh morphing weights given the current design \(\pmb{\delta}^k\) according to \[\pmb{\gamma}^k = \mathbf{M}^{-1} \cdot
\pmb{\delta}^k{\qquad(8.47)}\] and morph the mesh with \[\delta(\mathbf{x}) = \sum_{l=1}^P \gamma_i^k
\varphi(\lVert \mathbf{x}-\hat{\mathbf{x}}_i
\rVert).{\qquad(8.48)}\]
Compute the displacements \(\mathbf{u}^k\) by solving the FEM system
for the morphed mesh.
Compute the asymptotes as \(\mathbf{L}^k = \pmb{\delta}^k - s (\pmb{\delta}^+
- \pmb{\delta}^-)\) and \(\mathbf{U}^k
=\pmb{\delta}^k + s (\pmb{\delta}^+ - \pmb{\delta}^-)\) with
\(s \in (0,1)\) during the first two
iterations. In the following iterations, compute the lower asymptotes
according to \[L^k_i =
\begin{cases}
\delta^k_i - s (\delta^{k-1}_i-L^{k-1}_i) &
(\delta_i^k-\delta_i^{k-1})(\delta_i^{k-1}-\delta_i^{k-2}) < 0\\
\delta^k_i -
\frac{1}{\sqrt{s}} (\delta^{k-1}_i-L^{k-1}_i) & \text{else}
\end{cases}{\qquad(8.49)}\] and the upper asymptotes
according to \[U^k_i =
\begin{cases}
\delta^k_i + s (U^{k-1}_i-\delta^{k-1}_i) &
(\delta_i^k-\delta_i^{k-1})(\delta_i^{k-1}-\delta_i^{k-2}) < 0\\
\delta^k_i +
\frac{1}{\sqrt{s}} (U^{k-1}_i-\delta^{k-1}_i) & \text{else}
\end{cases}{\qquad(8.50)}\]
Compute the move limits as \[\begin{aligned}
\tilde{\pmb{\delta}}^{-,k} &= \max(\pmb{\delta}^-, 0.9
\mathbf{L}^k + 0.1 \pmb{\delta}^k) {\qquad(8.51)}\\
\tilde{\pmb{\delta}}^{+,k} &= \min(\pmb{\delta}^+, 0.9
\mathbf{U}^k + 0.1 \pmb{\delta}^k)
{\qquad(8.52)}\end{aligned}\]
Evaluate the gradients of the objective function \(\frac{\partial C}{\partial \delta_i}\) and
the constraint \(\frac{\partial g}{\partial
\delta_i}\) at \(\pmb{\delta}^k\) using automatic
differentiation.
Evaluate the analytical solution \[\begin{aligned}
\hat{\delta}_i(\mu) &=
\begin{cases}
\delta^-_i
&\textrm{if} \quad \frac{\partial
C}{\partial \delta_i} > 0, \frac{\partial g}{\partial \delta_i} >
0 \\
\frac{U_i^k\omega + L_i^k}{1+\omega}, \quad \omega =
\sqrt{-\mu\frac{(\delta_i^k-L_i^k)^2\frac{\partial g}{\partial
\delta_i}}{(U_i^k-\delta_i^k)^2\frac{\partial C}{\partial \delta_i}}}
&\textrm{if} \quad \frac{\partial
C}{\partial \delta_i} > 0, \frac{\partial g}{\partial \delta_i}
<0\\
\frac{U_i^k+L_i^k\omega}{1+\omega}, \quad \omega =
\sqrt{-\mu\frac{(U_i^k-\delta_i^k)^2\frac{\partial g}{\partial
\delta_i}}{(\delta_i^k-L_i^k)^2\frac{\partial C}{\partial \delta_i}}}
&\textrm{if} \quad \frac{\partial
C}{\partial \delta_i} < 0, \frac{\partial g}{\partial \delta_i} >
0\\
\delta^+_i
&\textrm{if} \quad \frac{\partial
C}{\partial \delta_i}< 0, \frac{\partial g}{\partial \delta_i} <
0.
\end{cases} {\qquad(8.53)}\\
\pmb{\delta}^* (\mu) &=
\textrm{clamp}\left(\hat{\pmb{\delta}}(\mu), \tilde{\pmb{\delta}}^{-,k},
\tilde{\pmb{\delta}}^{+,k}\right)
{\qquad(8.54)}\end{aligned}\]
Perform a line search to find the maximum in \[\max_{\mu>0}
\underline{\mathcal{L}}(\mu){\qquad(8.55)}\] with a gradient
descent method. Once again, we may use automatic differentiation to
compute the gradient for the optimization.
Repeat with steps 2-8 until convergence or a maximum number of
iterations is reached.
The following figures show the evolution of the design variables
during the optimization (left) and the final optimized structure (right)
following this procedure.


References
Biancolini, Marco Evangelos, Andrea Chiappa, Ubaldo Cella, Emiliano
Costa, Corrado Groth, and Stefano Porziani. 2020. “Radial Basis
Functions Mesh Morphing.” In Computational Science – ICCS
2020, edited by Valeria V. Krzhizhanovskaya, Gábor Závodszky,
Michael H. Lees, Jack J. Dongarra, Peter M. A. Sloot, Sérgio Brissos,
and João Teixeira, 294–308. Cham: Springer International Publishing.
Christensen, Peter W., and Anders Klarbring. 2008. An Introduction to Structural Optimization.
Springer Netherlands.
Eschenauer, H. A., and N. Olhoff. 2001.
“Topology optimization of continuum structures: A
review.” Applied Mechanics Reviews 54 (4):
331–90.
https://doi.org/10.1115/1.1388075.
Harzheim, Lothar. 2014. Strukturoptimierung,
Grundlagen und Anwendungen. Europa Lehrmittle.
Lazarov, B. S., and O. Sigmund. 2011.
“Filters in topology optimization based on Helmholtz-type
differential equations.” International Journal for
Numerical Methods in Engineering 86 (6): 765–81. https://doi.org/
https://doi.org/10.1002/nme.3072.
Sigmund, O. 2007.
“Morphology-based black and
white filters for topology optimization.” Structural
and Multidisciplinary Optimization 33: 401–24.
https://doi.org/10.1007/s00158-006-0087-x.
Sigmund, O., and J. Petersson. 1998.
“Numerical instabilities in topology optimization: A
survey on procedures dealing with checkerboards, mesh-dependencies and
local minima.” Structural Optimization 16: 68–75.
https://doi.org/10.1007/BF01214002.