Exercise 03 - Constrained optimization¶
We re-use the quadratic function from last exercise $f: \mathcal{R}^2 \rightarrow \mathcal{R}$ defined as
$$ f(\mathbf{x}) = (\mathbf{x} - \tilde{\mathbf{x}}) \cdot \mathbf{Q} \cdot (\mathbf{x} - \tilde{\mathbf{x}}) $$ with $$ \mathbf{Q} = \begin{pmatrix} 2 & 1 \\ 1 & 1 \end{pmatrix} \quad \text{and} \quad \tilde{\mathbf{x}} = \begin{pmatrix} -1\\ 1 \end{pmatrix} $$ to test the implemented gradient descent methods.
from math import sqrt
import matplotlib.pyplot as plt
import torch
from torchfem.utils import plot_contours
torch.set_default_dtype(torch.double)
# Define domain
x1 = torch.linspace(-3, 3, steps=100)
x2 = torch.linspace(-3, 3, steps=100)
x = torch.stack(torch.meshgrid(x1, x2, indexing="xy"), dim=2)
# Define constants
xt = torch.tensor([-1.0, 1.0])
Q = torch.tensor([[2.0, 1.0], [1, 1.0]])
# Define function
def f(x):
dx = x - xt
return torch.einsum("...i,ij,...j", dx, Q, dx)
# Plot function as contour lines
plot_contours(x, f(x), opti=[-1, 1], figsize=(5, 5))

Task 1 - Box constraints¶
We want to solve the problem $$ \min_{\mathbf{x}} \quad f(\mathbf{x})= (\mathbf{x}-\tilde{\mathbf{x}}) \cdot \mathbf{Q} \cdot (\mathbf{x}-\tilde{\mathbf{x}})\\ \textrm{s.t.} \quad \mathbf{x}^- \le \mathbf{x} \le \mathbf{x}^+\\ $$
We have a predefined function named box_constrained_descent(x_init, func, x_lower, x_upper, eta=0.1, maxiter=100) that takes an initial point $\mathbf{x}_0 \in \mathcal{R}^d$ named x_init, a function func, a lower limit $\mathbf{x}^- \in \mathcal{R}^d$ named x_lower, an upper limit $\mathbf{x}^+ \in \mathcal{R}^d$ named x_upper, a step size eta, and an iteration limit max_iter.
a) Implement a simple steepest gradient descent in that function . The function should return a list of all steps $\mathbf{x}_k \in \mathcal{R}^d$ taken during the optimization, i.e. [[x1_0, x2_0, ..., xd_0], [x1_1, x2_1, ..., xd_1], ...]
def box_constrained_descent(x_init, func, x_lower, x_upper, eta=0.1, max_iter=100):
# Copy initial x to new differentiable tensor x
x = x_init.clone().requires_grad_()
points = [x]
for _ in range(max_iter):
# Compute gradient
grad = torch.autograd.grad(func(x).sum(), x)[0]
# Make a step
x = x - eta * grad
# Project
x = torch.clamp(x, x_lower, x_upper)
# Save intermediate results
points.append(x)
return points
b) Test the function with the following code for $$ \mathbf{x}_0 = \begin{pmatrix}1\\-1\end{pmatrix} \quad \mathbf{x}^{-} = \begin{pmatrix}0\\-2\end{pmatrix} \quad \mathbf{x}^{+} = \begin{pmatrix}2\\2\end{pmatrix} $$ and play around with the optional parameters.
x_init = torch.tensor([1.0, -1.0])
x_lower = torch.tensor([0.0, -2.0])
x_upper = torch.tensor([2.0, 2.0])
path = box_constrained_descent(x_init, f, x_lower, x_upper)
plot_contours(
x,
f(x),
box=[x_lower, x_upper],
paths={"Box-constrained descent": path},
figsize=(5, 5),
)
print(f"Final values are x_1={path[-1][0]:.3f}, x_2={path[-1][1]:.3f}")
Final values are x_1=0.000, x_2=-0.000

Task 2 - Visualizing Lagrangian duality¶
We consider a function $f: \mathcal{R} \rightarrow \mathcal{R}$ defined as $$ f(x) = x^2 $$ for the box-constrained optimization problem $$ \min_{x} f(x) \\ s.t. \quad x \in [1, \infty). $$ We can solve this problem easily by clamping the unconstrained solution $\hat{x}=0$ with the domain as $$ x^* = \textrm{clamp}(\hat{x}, 1, \infty) = 1 $$ or using the algorithm from Task 1.
a) Use the algorithm from Task 1 box_constrained_descent to solve this one-dimensional problem.
# Define 'x_init', 'x_lower' and 'x_upper'
x_init = torch.tensor([5.0])
x_lower = torch.tensor([1.0])
x_upper = None
# Define f(x)
def f(x):
return x**2
# Solve the optimization
path = box_constrained_descent(x_init, f, x_lower, x_upper)
# Show the final result
x_test = torch.linspace(0, 6, 100)
with torch.no_grad():
plt.plot(x_test, f(x_test), color="black")
plt.scatter(path, f(torch.cat(path)), color="deeppink")
plt.xlabel("x")
plt.ylabel("f(x)")
plt.show()

However, we may also interpret the problem differently considering a function $g: \mathcal{R} \rightarrow \mathcal{R}$ defined as $$ g(x) = 1-x$$ for the constrained optimization problem $$ \min_{x} f(x) \\ s.t. \quad g(x) \le 0. $$
b) Formulate the Lagrangian and plot the Langrangian as function of $x$ and $\mu$. Explain the shape of the plot.
# Define domain
mu_s = torch.linspace(-10, 10, steps=100)
x_s = torch.linspace(-10, 10, steps=100)
mu, x = torch.meshgrid(mu_s, x_s, indexing="xy")
# Define Lagrangian
def L(x, mu):
return x**2 + mu * (1 - x)
# Plot the Lagrangian
plot_contours(torch.stack([mu, x], dim=2), L(x, mu), colorbar=True, figsize=(5, 5))
plt.xlabel("µ")
plt.ylabel("x")
plt.show()

c) Solve the problem analytically using KKT conditions.
The stationary point of the Lagrangian is $$ \frac{\partial L}{\partial x} = 2 x^* - \mu^* = 0,$$ $$ \frac{\partial L}{\partial \mu} = 1 - x^* = 0.$$ It follows that $x^*=1$ and $\mu^*=2$. The Lagrange parameter $\mu \neq 0$, therefore the constraint must be active $g(x^*)=0$.
d) Solve the problem using Lagrangian duality and visualize the dual problem in the plot by adding a line $x^*(\mu)$ and plotting the dual objective function. Interpret this line and how it is related to the dual procedure $$\max_{\mu} \min_{x} L(x, \mu)$$
The stationary point of the Lagrangian w.r.t. $x$ is $$ \frac{\partial L}{\partial x} = 2 x^* - \mu = 0,$$ hence $$ x^* = \frac{\mu}{2}$$ and the dual objective function is $$ \underline{L} = -\frac{1}{4}\mu^2 + \mu $$ with the maximum located at $\mu=2$. Then, the optimum is $x^*=1$.
plot_contours(
torch.stack([mu, x], dim=2),
L(x, mu),
opti=[2, 1],
colorbar=True,
figsize=(5, 5),
)
plt.plot(mu_s, mu_s / 2, "-w")
plt.xlim([-10, 10])
plt.xlabel("µ")
plt.ylim([-10, 10])
plt.ylabel("x")
plt.show()
Ignoring fixed y limits to fulfill fixed data aspect with adjustable data limits.

# The dual objective shows the values of the Lagrangian along the valley floor.
plt.plot(mu_s, -0.25 * mu_s**2 + mu_s)
plt.axvline(2.0, color="k")
plt.grid()
plt.xlim([-10, 10])
plt.xlabel("µ")
plt.ylabel("L(µ)")
plt.show()

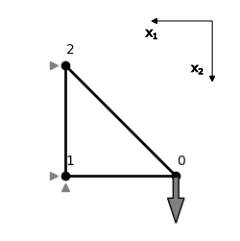
Task 3 - The first structural optimization problem¶
The three-bar truss illustrated below consists of three bars with the following properties:
- Bar 1 connecting nodes $n^0$ and $n^1$: cross section $A_1$, Young's modulus $E$, length $l$
- Bar 2 connecting nodes $n^1$ and $n^2$: cross section $A_2$, Young's modulus $E$, length $l$
- Bar 3 connecting nodes $n^0$ and $n^2$: cross section $A_3$, Young's modulus $E$, length $\sqrt{2}l$
The truss is subjected to a force $P>0$ at $\mathbf{n}^0$, fixed in $\mathbf{n}^1$ ($u^1_1=0, u^1_2=0$) and simply supported in $\mathbf{n}^2$ ($u^2_1=0$). We want to maximize the stiffness of the truss assembly by minimizing its compliance $P u_2^0$, where $u_2^0$ is the displacement in the vertical $x_2$-direction of node $n_0$. The volume of the trusses may not exceed a volume $V_0$. The design variables are the cross-sectional areas of the bars $\mathbf{a} = \begin{pmatrix} A_1,A_2,A_3\end{pmatrix}^\top$.
Credits: Peter W. Christensen and Anders Klarbring. An Introduction to Structural Optimization. Springer Netherlands, 2008.
a) Formulate the problem as a constrained optimization problem using an explicit expression for $u_2^0$.
The constrained optimization problem is $$ \min_{\mathbf{x}} f(\mathbf{a}) \\ s.t. \quad g(\mathbf{a}) = V(\mathbf{a}) - V_0 \le 0 \\ \quad \mathbf{a} \in \mathcal{R}^3_{>0} $$ with the compliance $$ f(\mathbf{a}) = P u_2^0 (\mathbf{a}) $$ and $$ V(\mathbf{a}) = a_1l+a_2l+a_3 \sqrt{2}l. $$ To obtain an expression for $u_2^0 (\mathbf{x})$, we nee to employ some mechanics: Free body diagrams provide us with forces in each truss $$P_1 = -P$$ $$P_2 = -P$$ $$P_3 = \frac{2}{\sqrt{2}} P.$$ Then we can evaluate static mechanics equations for each truss $$P_1 = - E a_1 \frac{u_1^0}{l}$$ $$P_2 = - E a_2 \frac{u_2^2}{l}$$ $$P_3 = E a_3 \frac{u_2^0-u_1^0-u_2^2}{2l}$$ and solve them for displacements: $$u_2^2 = \frac{Pl}{E} \frac{1}{a_1}$$ $$u_1^0 = \frac{Pl}{E} \frac{1}{a_2}$$ $$u_2^0 = u_2^2 + u_1^0 + \frac{2\sqrt{2}Pl}{E} \frac{1}{a_3}$$ Finally, we can express the compliance as $$f(\mathbf{x}) = \frac{P^2l}{E} \left( \frac{1}{a_1} + \frac{1}{a_2} + \frac{2\sqrt{2}}{a_3} \right)$$
b) Solve the problem analytically using KKT conditions.
The Lagrangian is $$ L(a_1, a_2, a_3) = \frac{1}{a_1} + \frac{1}{a_2} + \frac{2\sqrt{2}}{a_3} + \mu \left(a_1l+a_2l+a_3\sqrt{2}l-V_0\right).$$ The partial derivatives are $$ \frac{\partial L}{\partial a_1} = - \frac{1}{(a_1^*)^2} + \mu^* l = 0$$ $$ \frac{\partial L}{\partial a_2} = - \frac{1}{(a_2^*)^2} + \mu^* l = 0$$ $$ \frac{\partial L}{\partial a_3} = - \frac{2\sqrt{2}}{(a_3^*)^2} + \mu^* \sqrt{2}l = 0$$ $$ \frac{\partial L}{\partial \mu} = a_1^*l+a_2^*l+a_3^*\sqrt{2}l - V_0 = 0$$ Obviously, $a_2^* = a_1^*$ and $\mu^*=\frac{1}{l (a_1^*)^2}$. Then, the third equations becomes $$ \sqrt{2} a_1^* = a_3^*.$$ Inserting this to the last equation gives $$ a_1^* = a_2^* = \frac{V_0}{4l} $$ and finally $$ a_3^* = \frac{\sqrt{2}V_0}{4l}.$$
c) Solve the problem analytically using Lagrangian duality.
The problem is separable and the Lagrangian $$ L(a_1, a_2, a_3) = \frac{1}{a_1} + \frac{1}{a_2} + \frac{2\sqrt{2}}{a_3} + \mu \left(a_1l+a_2l+a_3\sqrt{2}l-V_0\right).$$ may be expressed as $$L(a_1, a_2, a_3) = L_0 + L_1(a_1) + L_2(a_2) + L_3(a_3) $$ with $$ L_0 = - \mu V_0 $$ $$ L_1(a_1) = \frac{1}{a_1} + \mu l a_1$$ $$ L_2(a_2) = \frac{1}{a_2} + \mu l a_2$$ $$ L_3(a_3) = \frac{2\sqrt{2}}{a_3} + \sqrt{2} \mu l a_3.$$ The stationary points are $$ \frac{ \partial L_1}{\partial a_1} = -\frac{1}{(a_1^*)^2} + \mu l = 0$$ $$ \frac{ \partial L_2}{\partial a_2} = -\frac{1}{(a_2^*)^2} + \mu l = 0$$ $$ \frac{ \partial L_3}{\partial a_3} = -\frac{2\sqrt{2}}{(a_3^*)^2} + \sqrt{2} \mu l = 0$$ resulting in the expressions $$ a_1^* = a_2^* = \frac{1}{\sqrt{\mu l}}$$ $$ a_3^* = \frac{\sqrt{2}}{\sqrt{\mu l}}.$$ These are used to formulate the dual objective function $$\underline{L}(\mu) = 8 \sqrt{\mu l} - \mu V_0.$$ The maximum of this function is found by setting $$\frac{ \partial \underline{L}}{\partial \mu} = 4\frac{\sqrt{l}}{\sqrt{\mu^*}} - V_0 = 0, $$ hence $\sqrt{\mu^* l}= \frac{4 l}{V_0}$, $a_1^* = a_2^* = \frac{V_0}{4l}$ and $a_3^* = \frac{\sqrt{2}V_0}{4l}$.
d) Define the objective function using $a_1=a_2$ and plot it in the $a_1$-$a_3$ plane as contour plot. Assuming $L=1$ and $V_0=1$, plot the contrained area.
# Define domain
a1 = torch.linspace(0.1, 1.0, steps=100)
a3 = torch.linspace(0.1, 1.0, steps=100)
a = torch.stack(torch.meshgrid(a1, a3, indexing="xy"), dim=2)
def compliance(a):
return 2.0 / a[..., 0] + 2.0 * sqrt(2.0) / a[..., 1]
def constraint(a1):
V_0 = 1.0
return 1.0 / sqrt(2.0) * (V_0 - 2.0 * a1)
plot_contours(a, compliance(a), opti=[0.25, sqrt(2.0) * 0.25], figsize=(5, 5))
plt.fill_between(a1, 1.0, constraint(a1), color=(0.7, 0.7, 0.7, 0.6))
plt.xlabel("$a_1$ | $a_2$")
plt.ylabel("$a_3$")
plt.xlim([0.1, 1.0])
plt.ylim([0.1, 1.0])
plt.show()
Ignoring fixed y limits to fulfill fixed data aspect with adjustable data limits.
